Autonomous Rover System using LeoRover (NASA-Intern)
Completed
- Software / Firmware Update on LeoRover Raspberry Pi
- Connect through SSH and RDP to LeoRover
- Set up manual, remote, joystick control of rover for manual overrides using Logitech Extreme 3D Pro Joystick.
- Set up RP Lidar device for autonomous mapping and added to ROS structure
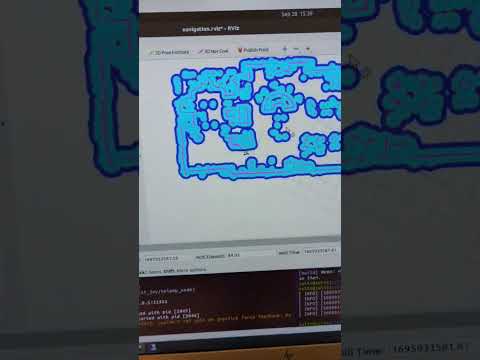
- Created SLAM map of HIVE lab
- Translate laserscan topic to be used in navigation stack for rover
- Created Georeferenced map of Mars Terrain Field and converted to a PGM map for autonomous navigation
- Created GeoJson Shape file grid for use with augmented reality space suits.
- Implemented SLAM library using lidar data and onboard IMU data with an extended kalman filter for localization and navigation.
- Implemented QR Scanner for “sample detection” in the SUITS challenge.
- Implemented Mumble API into use for VOIP function with DCU devices and COMM Tower controlled by physical switches.
Physical testing at Mars Simulated Terrain Field

Video Examples of Autonomous and controlled mapping in the HIVE Lab (click thumbnail to view video)